APARELHO DE INSPEÇÃO DE "HARD SPOT" - Versão Português -
Página 22/84
Instruções de Operação e Manutenção
traduzido e adaptado de: https://app.box.com/s/c6qfgtuhfg1yd2ottrfum98x8jmg7rn3
| Aparelho
de Inspeção de "Hard spot" • PLAMAT-M • 18201 |
|
| Instruções de Operação e Manutenção • V2.0 |
Estrutura e manuseio do aparelho
|
3.1 Unidade de inspeção
O aparelho está equipado com uma unidade de inspeção em sua frente. A unidade compreende oito sensores pontuais resistentes ao desgaste para inspeção quando na região de medição. Os oito sensores são posicionados intercalados em duas linhas, cada uma com quatro sensores. Esse arranjo fornece cobertura total quando varrendo a chapa.
Suportes localizados em ambos os lados da unidade permitem o uso de giz para fins de marcação de posição na chapa. As áreas já ensaiadas na chapa podem ser marcadas. Alternativamente, um cordão embedido com pó de giz pode ser usada para marcar linhas individuais na placa.
Ao deslocar o dispositivo móvel sobre superfícies irregulares ou inclinadas (como rampas), rodas adicionais na unidade de inspeção fornecem suporte para facilitar o movimento. Dependendo da inclinação, a unidade de inspeção pode atingir a rampa, mesmo quando estiver estacionada. Para evitar o contato direto entre a rampa e partes inferiores da unidade, solte as rodas e coloque-as na posição inferior. A unidade de inspeção é montada na região do aparelho com dispositivo de elevação do aparelho na parte traseira.
AVISO
|
! Danos potenciais dos sensores devido a terreno irregular!
Mova o aparelho com cuidado no chão, em particular em e sobre áreas irregulares com declives significativos.
|
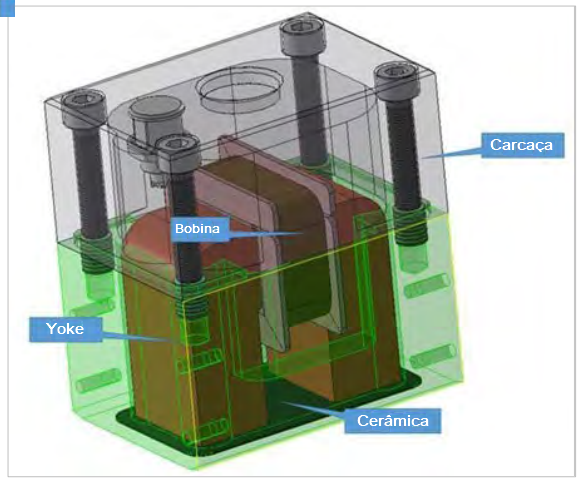 Figura 13: Sistema de sensores na carcaça de alumínio
Figura 13: Sistema de sensores na carcaça de alumínio
Uma chapa
cerâmica com 0,5 mm de espessura é empregada entre o sistema julgo
("yoke" / bobina e a placa. A cerâmica é conectada diretamente à seção
transversal do julgo, de forma que não provoque nenhum afastamento
adicional. O afastamento("lift-off") é oriundo apenas da
espessura da chapa cerâmica.
Os sensores não são fixos nessa estrutura, eles têm possibilidade para
se mover na direção vertical. O movimento dos sensores na direção
vertical é limitado pelas molas e pela barra acima das molas.
Cada sensor possui uma folga individual e pode se adaptar facilmente às
condições locais na placa (como curvatura, sujeira, ..) na posição de
cada sensor. Embora os sensores possam se mover na direção vertical,
eles são pressionados controladamente contra a placa de duas formas:
(1) as molas pressionam cada sensor contra a placa e (2) a força
magnética de atração propcia uma força normal adicional.
|
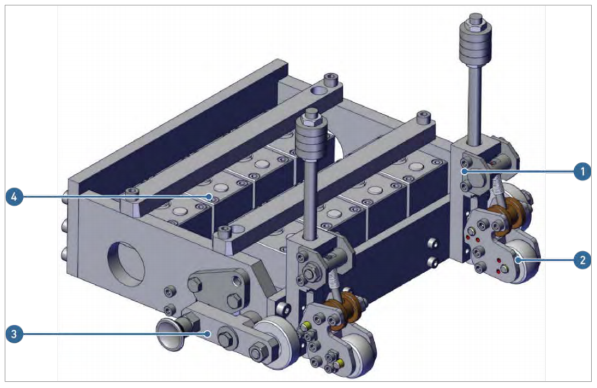
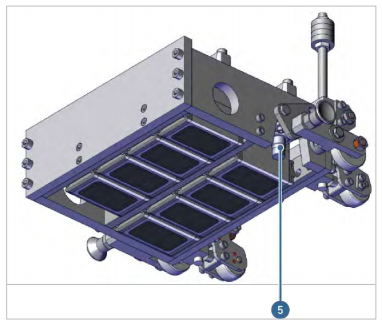
Figura
14: Duas vistas da unidade de inspeção
Tabela 3:
Unidade de inspeção
Pos.
|
Descrição
|
| 1
|
2 x unidade de marcação a giz
|
| 2
|
2 x rodízios
|
| 3
|
2 x rodas guia
|
| 4
|
2 x 4 sondas
|
| 5
|
1
x sensor de proximidade indutivo |
| ROSEN e IZfP Página 22 de
84 |
Confidencial! |
|